高效稳定智能飞行 低功耗、低抖动晶振YSO690PR实现无人机顺利飞行
随着科技的发展,无人机技术正迅速走向成熟,应用领域也不断扩展。在无人机的智能飞行和多功能应用中,石英可编程晶振 YSO690PR 扮演着重要的角色,为无人机的飞行稳定性和性能提供强有力的支持。YSO690PR是一款高性...

科技
54 条更新
高效稳定智能飞行 低功耗、低抖动晶振YSO690PR实现无人机顺利飞行
随着科技的发展,无人机技术正迅速走向成熟,应用领域也不断扩展。在无人机的智能飞行和多功能应用中,石英可编程晶振 YSO690PR 扮演着重要的角色,为无人机的飞行稳定性和性能提供强有力的支持。YSO690PR是一款高性...
高精度保障 智能机器人的“心脏”:宽电压有源晶振YSO110TR
随着科技的不断进步,智能机器人正逐渐成为工业自动化、智能交通、医疗护理等领域的重要助手。在智能机器人的核心控制系统中,高稳定性的时钟源尤为重要。宽电压有源晶振YSO110TR正是为满足这一需求而设计的一款出色...

复合机器人也称为移动-操作机器人,是目前机器人技术中的一种新型机器人。复合机器人将操作装置和移动装置相组合并搭配视觉系统和控制系统,使得机器人拥有 "手、脚、眼、脑” 等功能。复合机器人具有更高的智能性和灵活性,可实现更加精细、复杂的移动和操作任务。
一款产品需要在极端温度条件下保证较高的时钟精度和稳定性,这时候该怎么办?这两种晶振肯定大派用场。第一种是温补晶振,英文缩写TCXO。这种晶振通常用温度补偿电路,来实现不同温度下的晶振频率调整。它的温度稳定...

机器人相关专业术语繁多,准确掌握机器人常用术语的含义对机器人理论的学习十分重要。为此,本站专门对机器人常用术语进行系统梳理,并为每条术语制作介绍短视频。视频中详细介绍术语的中英文含义,并配以图片进行说明,期望对机器人知识的普及作出应有贡献。

在未来机器人获得大规模应用以后,多移动机器人协同工作的情形将越来越普遍,机器人集群调度问题也将更加凸显,因而亟需更高效、更智能的调度系统相配套。
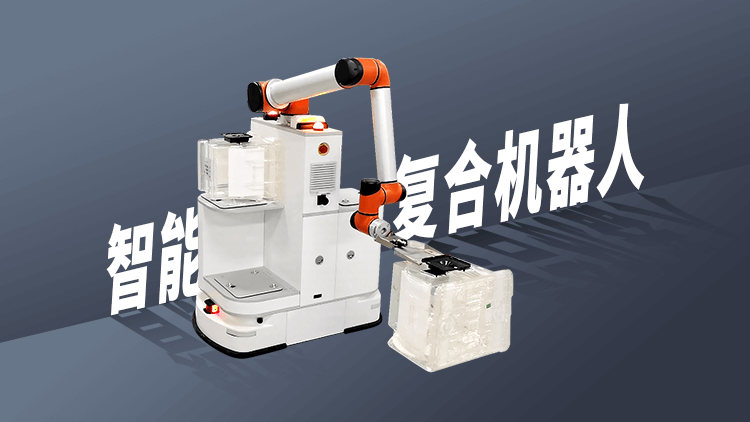
复合机器人,也称为复合协作机器人,是目前机器人技术中的一种新型机器人,它将多种不同类型的机器人进行组合,通过融合不同机器人的优势特点,让机器人拥有 "手、脚、眼、脑” 等,具有更高的智能化和灵活性,实现更加精细、复杂的任务操作。

随着人工智能和机器人技术的不断发展 ,协作机器人已成为工业生产和制造业中的一种重要机器人类型。相对于传统机器人,协作机器人更为安全、灵活和易于操作,能够与人类在同一工作环境下协同工作,提高生产效率和减少...
人机交互(HCI)是指操作人员通过移动机器人内置的输入设备和输出设备与移动机器人进行的信息交换过程。
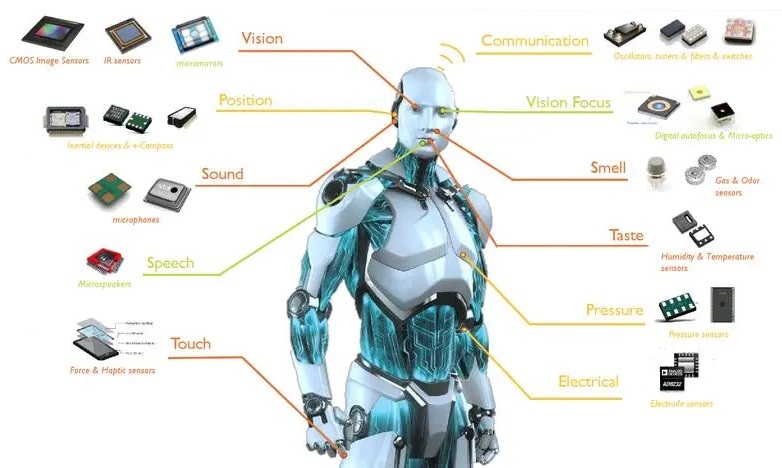
随着移动机器人拥有越来越高度感知能力和强大的信息处理能力,使它具有越来越多的功能并且可以完成不同的任务。移动机器人的感知能力类似于人体的感官系统,为了准确地...