
引言 由于工业机器人在速度、强度、精度及灵活性方面拥有诸多优势,因此被越来越多地用于各类应用中。随着机器人变得越来越轻并且在较高的负载下工作,传统的机器人设计方法会丧失其效用,这使得动态因素在机器人...

科技
54 条更新
引言 由于工业机器人在速度、强度、精度及灵活性方面拥有诸多优势,因此被越来越多地用于各类应用中。随着机器人变得越来越轻并且在较高的负载下工作,传统的机器人设计方法会丧失其效用,这使得动态因素在机器人...

移动机器人定位是确定其在未知环境中所处位置的过程,是实现移动机器人自动导航能力的关键。依据机器人所采用传感器类型的不同,其定位方式有所不同。目前应用较广泛的传感器有里程计、超声波、激光器、摄像机、红...

人类科技的进步使我们逐渐迈入机器人的时代。从解放生产力的角度而言,人类的双手将得到完全的释放。媒体已经不止一次的报道,未来机器人将大面积接手我们目前的体力劳动工作,甚至部分不需要很高创造能力的智力劳...
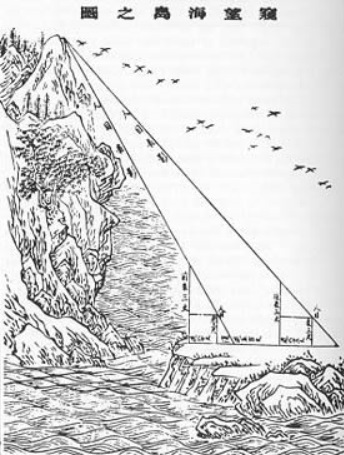
测距是估计两点连线长度的一项测量工作,它在许多科学与工程领域中都是最基本的任务之一。说到测距,人们通常会想到用量尺直接测定两点长度的“直接法”。用直接法测距,要求测量目标点是可达的。然而,...
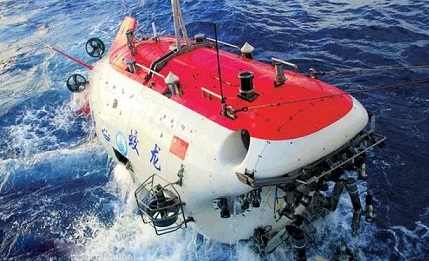
众所周知,地球表面的71%被海洋所覆盖,其面积达3.61亿平方公里之巨。从资源利用的角度看,海洋及其深层所蕴藏的渔业、矿产和石油等资源十分丰富。但是,鉴于海洋环境极端复杂,开发海洋资源较陆地要困难得多。水...
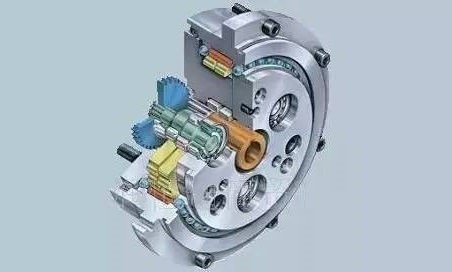
当我们在无限憧憬机器人时代的时候,你可曾知道,机器人最关键的机械结构之一RV减速机,到今天,中国仍然不具备设计和制造能力。“十二五”时期,国家“863”计划将其列入重点攻克的瓶颈。国...
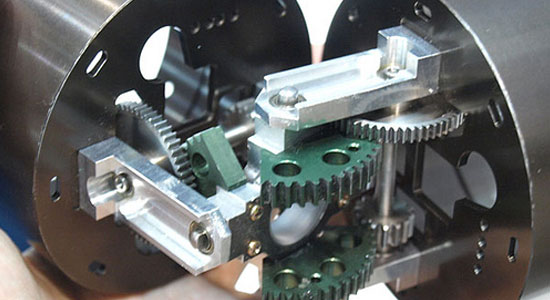
机器人连杆的运动来自于机器人关节驱动机构。一个机器人关节驱动机构至少包括三个组成部分:关节、驱动装置和传动装置。 关节是机器人连杆接合部位形成的运动副。对大多数机器人而言,关节只能是旋转式或者...

当前,工业机器人产业市场呈现爆炸性增长势头,而工业机器人产业的发展必将为其核心零配件应用提供众多机会。工业机器人除了本体以外,主要有三大核心零配件,控制器、伺服系统、减速器,它们占到工业机器人成本的...

目前人工智能的主要学派有下列三家: (1) 符号主义(symbolicism),又称为逻辑主义、心理学派或计算机学派,其原理主要为物理符号系统(即符号操作系统)假设和有限合理性原理。 (2) 连接主义(connectio...
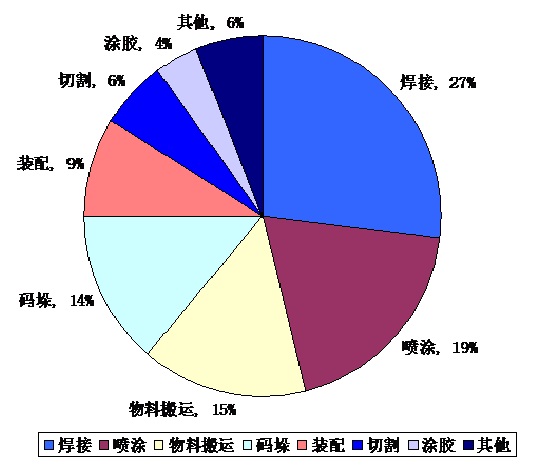
机器人技术最早起源于美国,1954年美国率先提出了机器人应用于工业生产的概念,并于1962年制造出世界首台实用机器人,当时机器人只是被应用于汽车制造行业。随着机器人技术的不断发展,它们被广泛的应用于工业生产...